MR系列 MR35/50
动作自如的7轴“手腕”机器人
采用可进行更加复杂动作的7轴结构
通过7轴化,使到目前为止6轴结构无法实现的在狭小空间以及有障碍物场所的机器人的应用成为可能。 根据手腕部可搬运重量的不同,备有MR35(可搬运重量35kg),MR50(可搬重量50kg)2种类型。 可供选择的有吊挂式,壁挂式,倾斜式设置方式。 内置型的有用于伺服电动机驱动的工具接线(用于2轴),因不与周边设备发生干涉,布局方便。
高环境适应性
作为标准,机器人的主机,手腕部的防尘防滴规格均相当于IP67,在严酷的工作环境下也可以使用。
以往的机器人
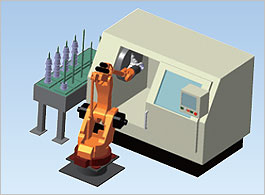
机器人占据了设备的正面
MR 系列7轴机器人
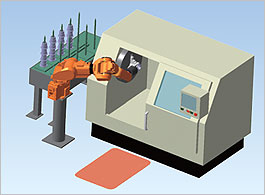
7轴结构的柔性动作
机器人设置在设备的侧面
作业空间较大,易于维护

工作范围
MR35・MR50的工作范围
紧凑的设置空间 广阔的工作范围
- 与此前同等可搬能力的机型相比,整体幅面缩减了30%,构架干涉半径缩减了40%。另一方面,前后行程扩大了20%,飞跃性的提高了设置机器人时的布局自由度。
(*1) 本产品的额定功率,规格,外部尺寸等如需改良而变更,恕不另行通告。
(*2) 如果本产品的最后使用者与军事相关,或用于兵器等的制造,可能成为“外汇及国际贸易法”规定的出口限制的对象。出口时,请进行充分的审查和办理所需的出口手续。
规格(型号)
MR35・MR50的规格
| 型号 | MR35-01 | MR50-01 | |
|---|---|---|---|
| 结构 | 关节型 | ||
| 自由度 | 7 | ||
| 驱动方式 | AC伺服方式 | ||
| 最 大 工 作 范 围 |
J1 | ±2.88rad (±165°) | |
| J2 | +2.53~-0.52rad (+145~-30°) | ||
| J3 | +2.44~-2.55rad (+140~-146°) | ||
| J4 | ±6.28rad (±360°) | ||
| J5 | ±2.18rad (±125°) | ||
| J6 | ±7.84rad (±450°) | ||
| J7 | ±3.32rad (±190°) | ||
| 最 大 速 度 |
J1 | 3.14rad/s (180°/s) | 3.05rad/s (175°/s) |
| J2 | 3.05rad/s (175°/s) | 2.44rad/s (140°/s) | |
| J3 | 3.14rad/s (180°/s) | 2.88rad/s (165°/s) | |
| J4 | 5.32rad/s (305°/s) | 4.45rad/s (255°/s) | |
| J5 | 5.32rad/s (305°/s) | 4.45rad/s (255°/s) | |
| J6 | 7.33rad/s (420°/s) | 6.46rad/s (370°/s) | |
| J7 | 2.27rad/s (130°/s) | ||
| 可搬重量 | 腕部 | 35kg | 50kg |
| 上臂部 | 15kg | ||
| 手腕容许静载荷扭矩 | J4 | 160N・m | 210N・m |
| J5 | 160N・m | 210N・m | |
| J6 | 90N・m | 130N・m | |
| 手腕容许最大惯性力矩*1 | J4 | 16kg・m2 | 30kg・m2 |
| J5 | 16kg・m2 | 30kg・m2 | |
| J6 | 5kg・m2 | 12kg・m2 | |
| 位置重复精度*2 | ±.07mm | ||
| 最高使用空气压力 | 0.49MPa (5.0kgf/cm2)以下 | ||
| 周围温度 | 0~45°C | ||
| 设置条件 | 落地式 | ||
| 耐环境性*3 | 主机部 | 等同于IP67(防尘防滴) | |
| 腕部 | 等同于IP67(防尘防滴) | ||
| 主机重量 | 745kg | ||
(*1) 手腕容许最大惯性力矩根据手腕负荷条件的不同而不同,敬请注意。
(*2) 也有吊挂式,壁挂式,倾斜设置可供选择。
(*3) 因有机溶剂,酸,碱,以及氯类与汽油类切削液等对密封材料有损害,禁止使用。